工業機器人關節應用案例
來源:深圳市鑫海文科技有限公司|發布時間:2019-04-29 16:26
項目名稱:機器人關節 應用領域:自動化設備
地區:韓國 合作業務:伺服驅動器
上線時間:2018年3月25日 設備型號:機器人關節ZDHXY02
背景需求
企業概述:
公司運營總部位于韓國首爾,主要開展新型智能機器人的研發、區域及海外營銷及配套服務。智能機器人產品主要包括:協作機器人、雙臂協作機器人、復合機器人、乒乓球機器人等,主要涵蓋工業、民用等多個領域。作為全球機器人行業的佼佼者,該公司致力于用創新技術推進全球機器人行業發展。
公司自主研發的新一代智能機器人產品及核心部件的測試、生產。同時運用該公司的機器人產品系列以及強大的機器人系統技術,開展工業4.0系統解決方案,為終端客戶提供集核心制造技術開發、工藝流程研究及系統規劃于一體的數字化工廠集成規劃、設計與總裝總調工作。
客戶訴求
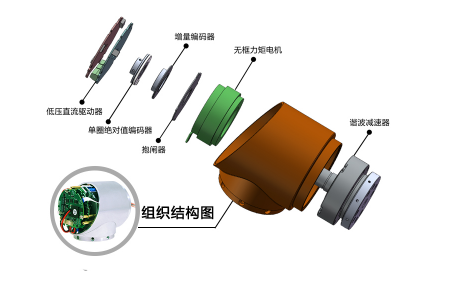
工業機器人關節
上圖為工業機器人關鍵的組織結構圖,包含了工業機器人關節所需要的所有零配件。其中有四大核心部件會影響該產品的性能:力矩電機,驅動器,編碼器,諧波減速器。該四大部件中電機和驅動器是需要我們配合客戶進行開發和生產。
工業機器人本身是國內的產品短板,而國內無刷電機和驅動器的研發和設計是長期以來的短板,特別是面對這種比較嚴苛的使用環境,還要符合工業自動化等行業的認證,同時高頻度的工作條件下也要保證產品的穩定性。這就無形中加大了該產品的研發設計難度,也導致了客戶長期以來找不到好的電機和驅動器來滿足他們新產品的需求。
解決方案
針對機器人行業的情況我們做了很多的工作調研,目前主要有兩大應用方向,一個是消費類機器人,這種類型的機器人要求很低,零部件的精度和品質是非常一般的。另外一個就是工業機器人,目前全球工業機器人的開發廠家很多,但是很多機器人的廠家都會被運動控制部分所困擾,因為運動控制算法非常復雜,同時對于工業應用的效果又有非常大的影響。
用我們現有的伺服驅動沒辦法達到客戶的要求,必須在驅動算法上進行深度的學習和改良,同時針對國際一線驅動器廠家的效果進行詳細的研究和學習,從產品的應用端進行反復的求證。再配合力矩電機,編碼器,諧波減速箱等部件的綜合表現。在現有的配件體現下,爭取達到最好的效果。
確定好了開發方向以后,我們開始與客戶進行聯合開發,由客戶提供測試要求和測試環境,我們提供電機和驅動,配合客戶的控制部分進行反復調試。整個項目經歷了一年多。一開始的效果不盡如人意,我們也一度對該項目的開發產生了退意,不過好在客戶對我們不離不棄,我們的技術人員也一直筆耕不輟,終于在去年實現了突破。在整體關節效果部分達到了客戶要求的預期,我們也進一步進行效果的優化,逐漸滿足了客戶對于該產品的應用需求。
效果反饋
在經過客戶近半年的測試后,我們才開始進行小批量的生產。目前第一批投產出去的產品客戶還在正常使用,而我們也在進行產品跟進,并且結合客戶的情況進行下一步的優化。




 在線客服
在線客服